
2 基于 Keil MDK 移植 RT-Thread Nano
开发环境:
Keil版本:V5.30
RT-Thread版本:3.1.3
本文介绍如何基于 Keil MDK 移植 RT-Thread Nano ,并以一个 stm32f103 的基础工程作为示例进行讲解。RT-Thread Nano 已集成在 Keil MDK 中,可以直接在 IDE 中进行下载添加。本文档介绍了如何使用 MDK 移植 RT-Thread Nano,并以一个 stm32f103 的基础工程作为示例进行讲解。
移植 Nano 的主要步骤:
1.准备一个基础的 keil MDK 工程,并获取 RT-Thread Nano pack 安装包并进行安装。
2.在基础工程中添加 RT-Thread Nano 源码。
3.适配 Nano,主要从 中断、时钟、内存这几个方面进行适配,实现移植。
4.验证移植结果:编写第一个应用代码,基于 RT-Thread Nano 闪烁 LED。
5.最后可对 Nano 进行配置:Nano 是可裁剪的,通过配置文件 rtconfig.h 实现对系统的裁剪。
2.1 RT-Thread移植前的准备
准备一份基础的裸机源码工程,如一份 stm32 的 LED 指示灯闪烁示例代码。
在移植 RT-Thread Nano 之前,我们需要准备一个能正常运行的裸机工程。作为示例,本文使用的是基于 STM32F103 的一个 LED 闪烁程序。程序的主要截图如下:
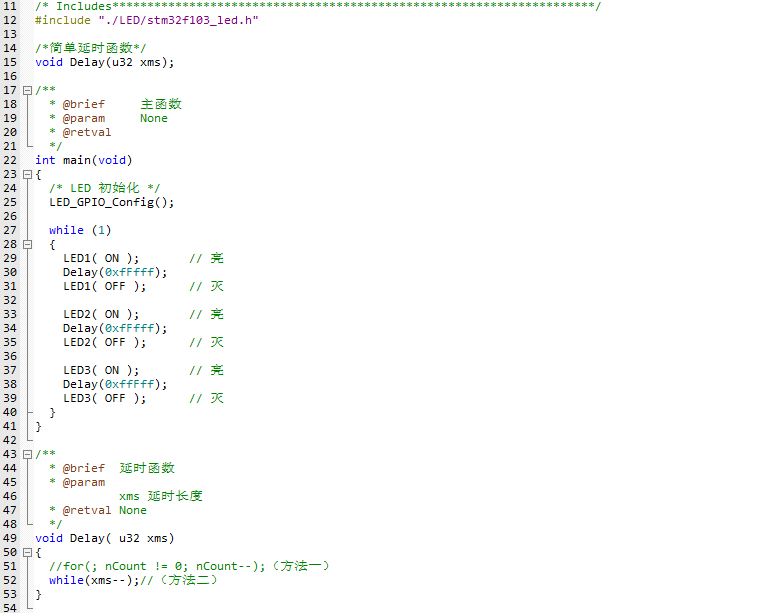
在我们的例程中主要做了系统初始化与 LED 闪烁功能,编译下载程序后,就可以看到 LED 闪烁了。读者可以根据自己的需要使用的芯片,准备一个类似的裸机工程。
2.2 Nano Pack 安装
Nano Pack 可以通过在 Keil MDK IDE 内进行安装,也可以手动安装。下面开始介绍两种安装方式。
2.2.1在 IDE 内安装 RT-Thread
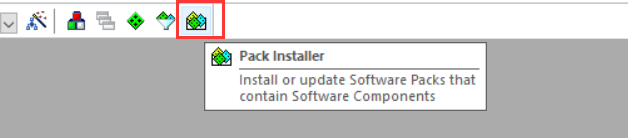
打开 MDK 软件,点击工具栏的 Pack Installer 图标:
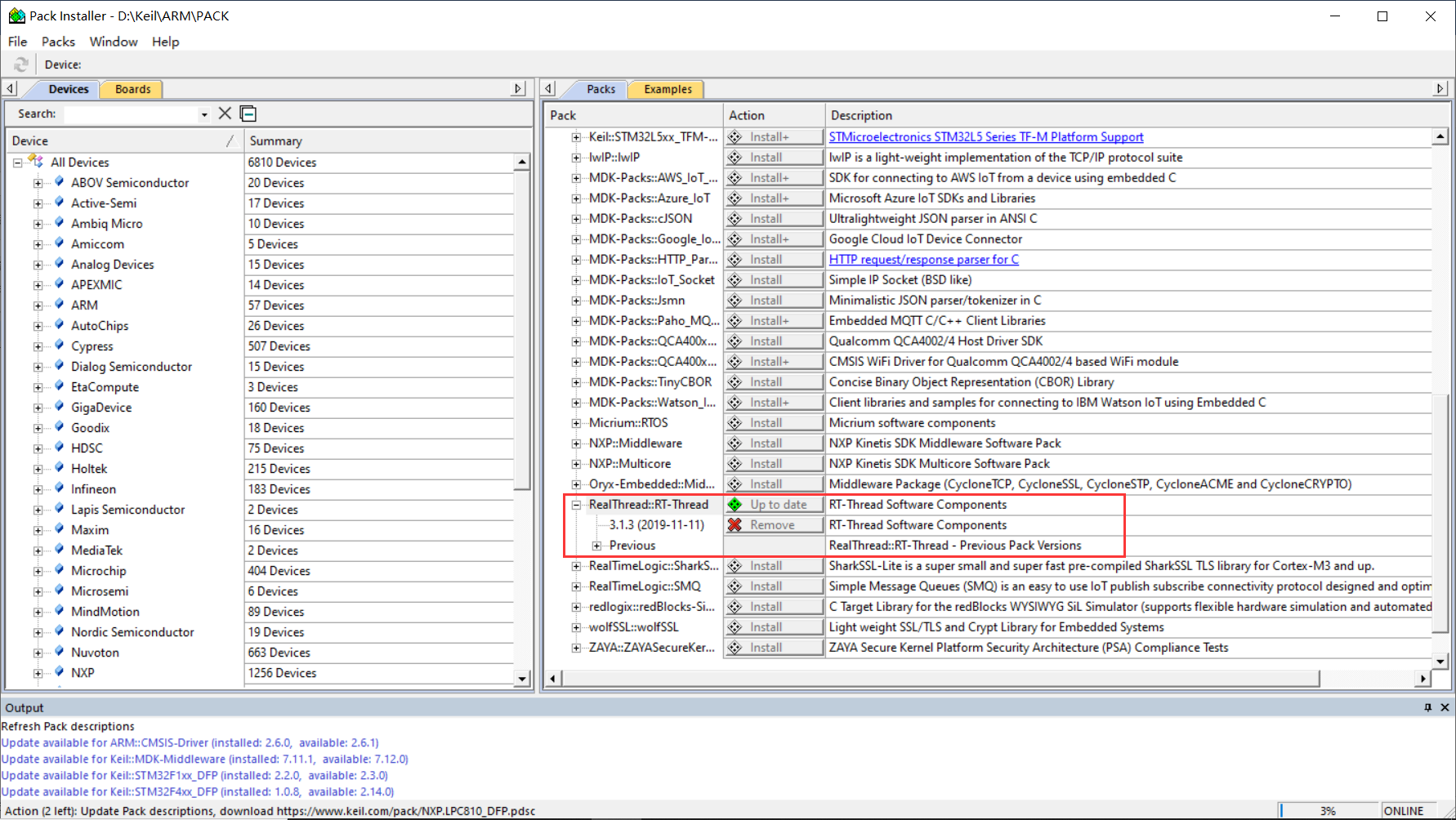
点击右侧的 Pack,展开 Generic,可以找到 RealThread::RT-Thread,点击 Action 栏对应的 Install ,就可以在线安装 Nano Pack 了。另外,如果需要安装其他版本,则需要展开 RealThread::RT-Thread,进行选择。
2.2.2手动安装RT-Thread
我们也可以从官网下载安装文件,RT-Thread Nano 离线安装包下载。
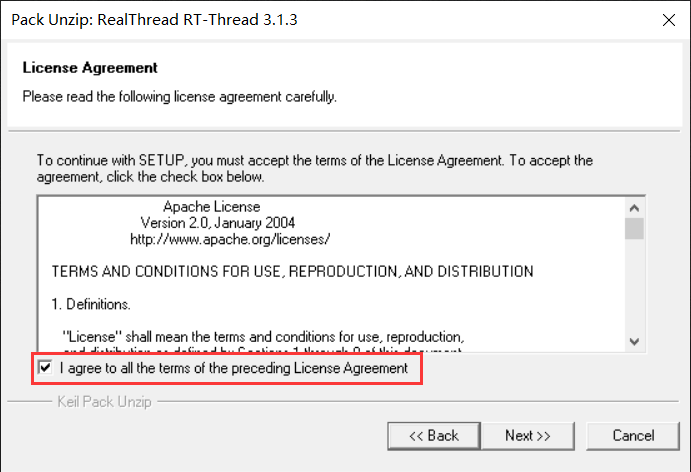
下载结束后双击文件进行安装:
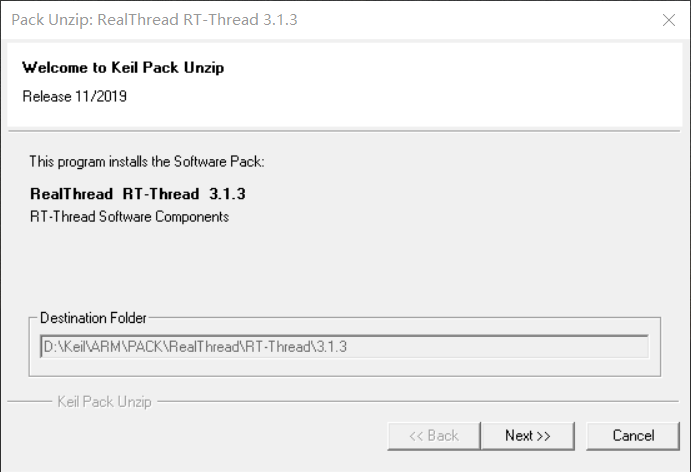
同意许可声明,点击下一步。
2.3添加 RT-Thread Nano 到工程
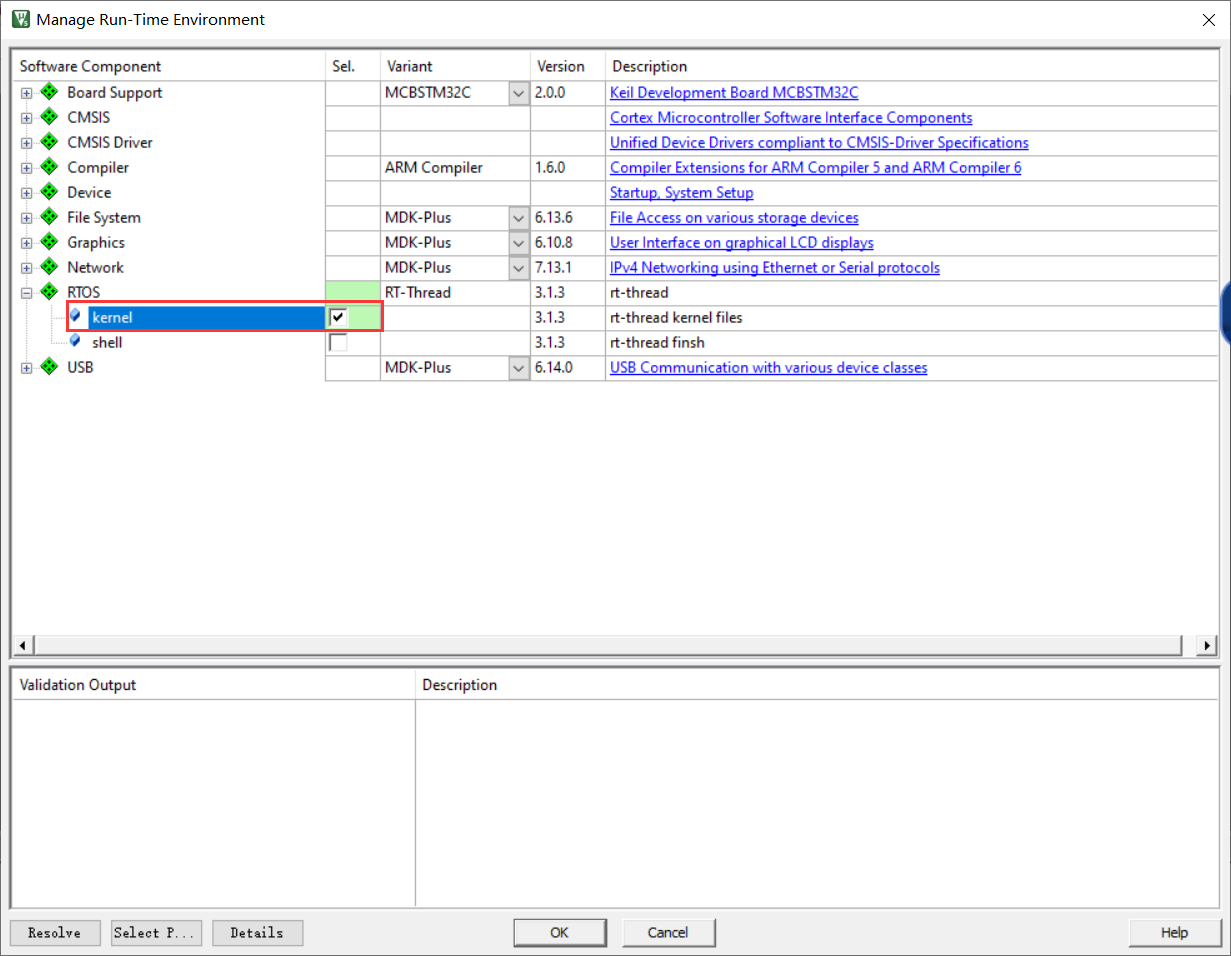
打开已经准备好的可以运行的裸机程序,将 RT-Thread 添加到工程。如下图,点击 Manage Run-Time Environment。
[url=https://imgchr.com/i/B5dLge][img]https://s1.ax1x.com/2020/11/07/B5dLge.png[/img][/url]
![https://imgchr.com/i/B5dLge][img]https://s1.ax1x.com/2020/11/07/B5dLge.png[/img][/url](https://imgchr.com/i/B5dLge%5D%5Bimg%5Dhttps://s1.ax1x.com/2020/11/07/B5dLge.png%5B/img%5D%5B/url){kind=link}
在 Manage Rum-Time Environment 里 "Software Component" 栏找到 RTOS,Variant 栏选择 RT-Thread,然后勾选 kernel,点击 "OK" 就添加 RT-Thread 内核到工程了。
现在可以在 Project 看到 RT-Thread RTOS 已经添加进来了,展开 RTOS,可以看到添加到工程的文件:
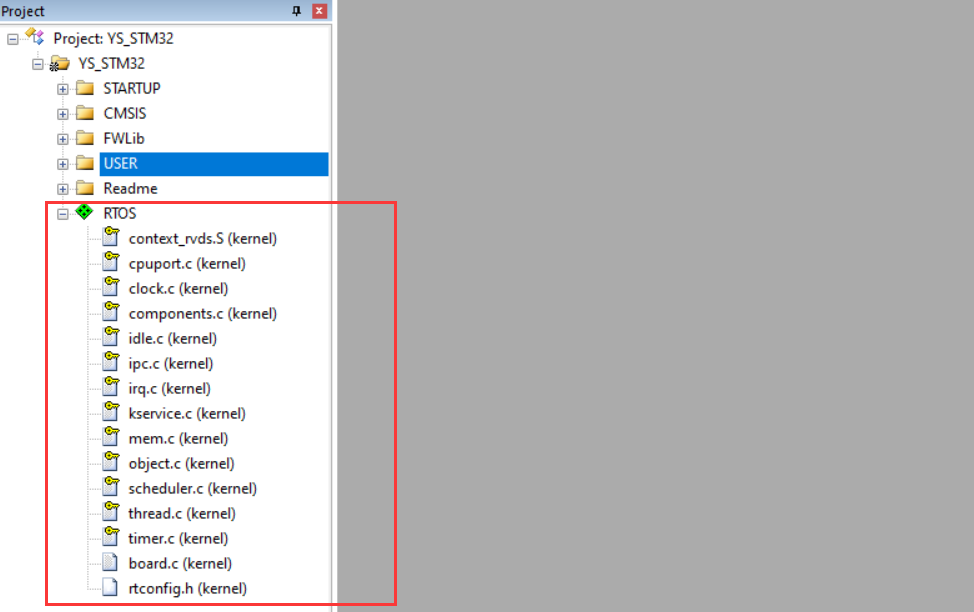
Cortex-M 芯片内核移植代码:
context_rvds.s
cpuport.c
Kernel 文件包括:
clock.c
components.c
device.c
idle.c
ipc.c
irq.c
kservice.c
mem.c
object.c
scheduler.c
thread.c
timer.c
配置文件:
board.c
rtconfig.h
2.4适配 RT-Thread Nano
2.4.1中断与异常处理
RT-Thread 会接管异常处理函数 HardFault_Handler() 和悬挂处理函数 PendSV_Handler(),这两个函数已由 RT-Thread 实现,所以需要删除工程里中断服务例程文件中的这两个函数,避免在编译时产生重复定义。如果此时对工程进行编译,没有出现函数重复定义的错误,则不用做修改。
2.4.2系统时钟配置
需要在 board.c 中实现 系统时钟配置(为 MCU、外设提供工作时钟)与 os tick 的配置(为操作系统提供心跳 / 节拍)。
如下代码所示,SystemCoreClockUpdate() 对系统时钟进行更新,_SysTick_Config() 配置了 OS Tick。此处 OS Tick 使用滴答定时器 systick 实现,需要用户在 board.c 中实现 SysTick_Handler() 中断服务例程,调用 RT-Thread 提供的 rt_tick_increase() ,如下图所示。
/* board.c */
void rt_hw_board_init()
{
/* System Clock Update */
SystemCoreClockUpdate();
/* System Tick Configuration */
_SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}
由于HardFault_Handler()、PendSV_Handler()和 SysTick_Handler() 中断服务例程由用户在 board.c 中重新实现,做了系统 OS Tick,所以还需要删除工程里中原本已经实现的 HardFault_Handler()、PendSV_Handler()和 SysTick_Handler() ,避免在编译时产生重复定义。如果此时对工程进行编译,没有出现函数重复定义的错误,则不用做修改。
2.4.3内存堆初始化
系统内存堆的初始化在 board.c 中的 rt_hw_board_init() 函数中完成,内存堆功能是否使用取决于宏 RT_USING_HEAP 是否开启,RT-Thread Nano 默认不开启内存堆功能,这样可以保持一个较小的体积,不用为内存堆开辟空间。
开启系统 heap 将可以使用动态内存功能,如使用 rt_malloc、rt_free 以及各种系统动态创建对象的 API。若需要使用系统内存堆功能,则打开 RT_USING_HEAP 宏定义即可,此时内存堆初始化函数 rt_system_heap_init() 将被调用,如下所示:

初始化内存堆需要堆的起始地址与结束地址这两个参数,系统中默认使用数组作为 heap,并获取了 heap 的起始地址与结束地址,该数组大小可手动更改,如下所示:
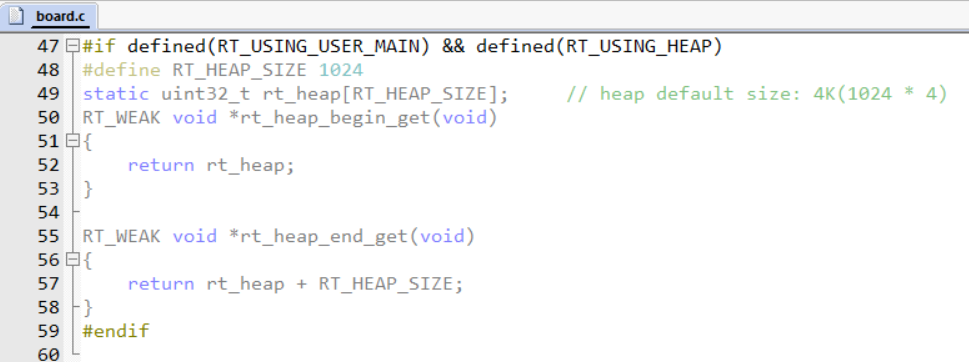
注意:开启 heap 动态内存功能后,heap 默认值较小,在使用的时候需要改大,否则可能会有申请内存失败或者创建线程失败的情况,修改方法有以下两种:
可以直接修改数组中定义的 RT_HEAP_SIZE 的大小,至少大于各个动态申请内存大小之和,但要小于芯片 RAM 总大小。
也可以参考《RT-Thread Nano 移植原理》——实现动态内存堆 章节进行修改,使用 RAM ZI 段结尾处作为 HEAP 的起始地址,使用 RAM 的结尾地址作为 HEAP 的结尾地址,这是 heap 能设置的最大值的方法。
2.5编写第一个应用
移植好 RT-Thread Nano 之后,则可以开始编写第一个应用代码验证移植结果。此时 main() 函数就转变成 RT-Thread 操作系统的一个线程,现在可以在 main() 函数中实现第一个应用:板载 LED 指示灯闪烁,这里直接基于裸机 LED 流水灯灯进行修改。
1.首先在文件首部增加 RT-Thread 的相关头文件
#include <rtthread.h>
static struct rt_thread led_thread;
static char led_thread_stack[256];2.编写线程入口函数
static void led_thread_entry(void *parameter)
{
while(1)
{
LED1( ON ); // 亮
rt_thread_mdelay(500);
LED1( OFF ); // 灭
LED2( ON ); // 亮
rt_thread_mdelay(500);
LED2( OFF ); // 灭
LED3( ON ); // 亮
rt_thread_mdelay(500);
LED3( OFF ); // 灭
}
}将延时函数替换为 RT-Thread 提供的延时函数 rt_thread_mdelay()。该函数会引起系统调度,切换到其他线程运行,体现了线程实时性的特点。
3.在 main() 函数中(也就是在 main 线程中)初始化 LED 引脚、初始化线程,并开始。
int main(void)
{
rt_err_t rst;
/* LED 初始化 */
LED_GPIO_Config();
rst = rt_thread_init(&led_thread,
"ledshine",
led_thread_entry,
RT_NULL,
&led_thread_stack[0],
sizeof(led_thread_stack),
RT_THREAD_PRIORITY_MAX-2,
20);
if(rst == RT_EOK)
{
rt_thread_startup(&led_thread);
}
}编译程序之后下载到芯片就可以看到基于 RT-Thread 的程序运行起来了,可以看到三个LED灯不同地闪烁。
注意:当添加 RT-Thread 之后,裸机中的 main() 函数会自动变成 RT-Thread 系统中 main 线程 的入口函数。由于线程不能一直独占 CPU,所以此时在 main() 中使用 while(1) 时,需要有让出 CPU 的动作,比如使用 rt_thread_mdelay() 系列的函数让出 CPU。
与裸机 LED 闪烁应用代码的不同:
1). 延时函数不同: RT-Thread 提供的 rt_thread_mdelay() 函数可以引起操作系统进行调度,当调用该函数进行延时时,本线程将不占用 CPU,调度器切换到系统的其他线程开始运行。而裸机的 delay 函数是一直占用 CPU 运行的。
2). 初始化系统时钟的位置不同:移植好 RT-Thread Nano 之后,不需要再在 main() 中做相应的系统配置(如 hal 初始化、时钟初始化等),这是因为 RT-Thread 在系统启动时,已经做好了系统时钟初始化等的配置。
2.6配置 RT-Thread Nano
用户可以根据自己的需要通过修改 rtconfig.h 文件里面的宏定义配置相应功能。
RT-Thread Nano 默认未开启宏 RT_USING_HEAP,故只支持静态方式创建任务及信号量。若要通过动态方式创建对象则需要在 rtconfig.h 文件里开启 RT_USING_HEAP 宏定义。
MDK 的配置向导 configuration Wizard 可以很方便的对工程进行配置,Value 一栏可以选中对应功能及修改相关值,等同于直接修改配置文件 rtconfig.h。更多细节配置详见 《 RT-Thread Nano 配置》。
代码获取方法
1.长按下面二维码,关注公众号[嵌入式实验楼]
2.在公众号回复关键词[RT-Thread]获取资源
