开发环境:
开发系统:Ubuntu 20.04
开发板:Pegasus物联网开发板
MCU:Hi3861
OpenHarmony版本:3.0.1-LTS
4.1新建工程及配置
1.新建工程及源码
1) 新建目录
$ mkdir hello在applications/sample/myapp中新建src目录以及myapp.c文件,代码如下所示。
#include <stdio.h>
#include "ohos_init.h"
#include "ohos_types.h"
void app_task(void)
{
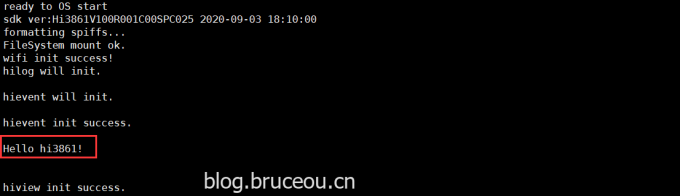
printf("\n");
printf("Hello hi3861!\n");
printf("\n");
}
SYS_RUN(app_task);2) 新建编译组织文件
新建applications/sample/myapp/BUILD.gn文件,内容如下所示:
static_library("myapp") {
sources = [
"src/myapp.c"
]
include_dirs = [
"//utils/native/lite/include"
]
}-
static_library中指定业务模块的编译结果,为静态库文件libmyapp.a,开发者根据实际情况完成填写。
-
sources中指定静态库.a所依赖的.c文件及其路径,若路径中包含"//"则表示绝对路径(此处为代码根路径),若不包含"//"则表示相对路径。
-
include_dirs中指定source所需要依赖的.h文件路径
新建的工程目录如下:
$ tree
2.添加新组件
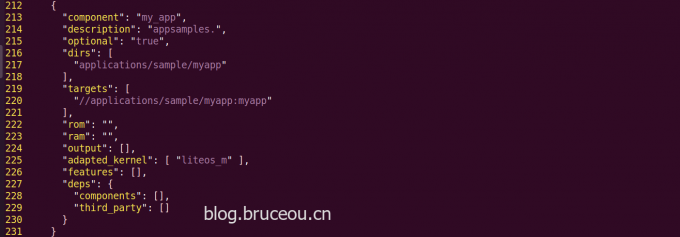
修改文件build/lite/components/applications.json,添加组件hello_world_app的配置。
{
"component": "my_app",
"description": "appsamples.",
"optional": "true",
"dirs": [
"applications/sample/myapp"
],
"targets": [
"//applications/sample/myapp:myapp"
],
"rom": "",
"ram": "",
"output": [],
"adapted_kernel": [ "liteos_m" ],
"features": [],
"deps": {
"components": [],
"third_party": []
}
},
3.修改单板配置文件
修改文件vendor/hisilicon/hispark_pegasus/config.json,新增my_app组件的条目。
{
"subsystem": "applications",
"components": [
{ "component": "wifi_iot_sample_app ", "features":[] }
{ "component": "my_app", "features":[] }
]
},
4.关闭xts测试子系统。
系统每次开机后都要跑xts认证程序,这里先删除该部分内容。

4.2编译下载验证
接下来就可以编译了。
$ hb set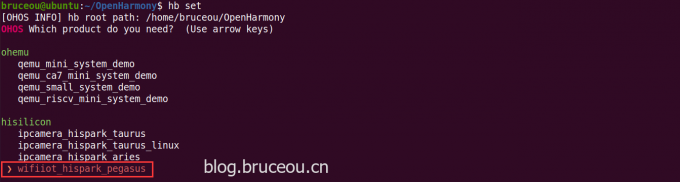
全编译。
$ hb build -f
成功编译后,固件在out/hispark_pegasus/wifiiot_hispark_pegasus目录下。

Hi3861_wifiiot_app_allinone.bin就是需要烧写的固件。
然后把固件下载到板子中。
接下来就可以根据该实例开发自己的应用了。
4.3系统启动流程分析
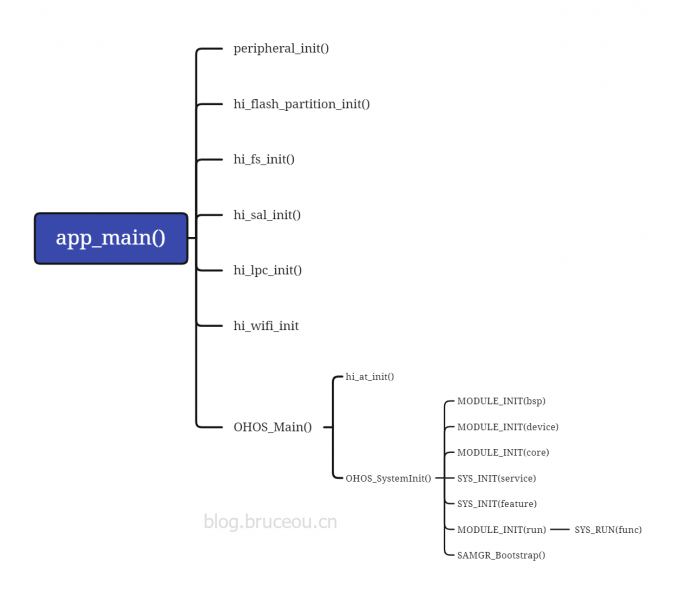
下面简单分析下系统的启动流程,系统的入口函数是app_main(),在device/hisilicon/hispark_pegasus/sdk_liteos/app/wifiiot_app/src/app_main.c文件中。
hi_void app_main(hi_void)
{
#ifdef CONFIG_FACTORY_TEST_MODE
printf("factory test mode!\r\n");
#endif
const hi_char* sdk_ver = hi_get_sdk_version();
printf("sdk ver:%s\r\n", sdk_ver);
hi_flash_partition_table *ptable = HI_NULL;
peripheral_init();
peripheral_init_no_sleep();
#ifndef CONFIG_FACTORY_TEST_MODE
hi_lpc_register_wakeup_entry(peripheral_init);
#endif
hi_u32 ret = hi_factory_nv_init(HI_FNV_DEFAULT_ADDR, HI_NV_DEFAULT_TOTAL_SIZE, HI_NV_DEFAULT_BLOCK_SIZE);
if (ret != HI_ERR_SUCCESS) {
printf("factory nv init fail\r\n");
}
/* partion table should init after factory nv init. */
ret = hi_flash_partition_init();
if (ret != HI_ERR_SUCCESS) {
printf("flash partition table init fail:0x%x \r\n", ret);
}
ptable = hi_get_partition_table();
ret = hi_nv_init(ptable->table[HI_FLASH_PARTITON_NORMAL_NV].addr, ptable->table[HI_FLASH_PARTITON_NORMAL_NV].size,
HI_NV_DEFAULT_BLOCK_SIZE);
if (ret != HI_ERR_SUCCESS) {
printf("nv init fail\r\n");
}
#ifndef CONFIG_FACTORY_TEST_MODE
hi_upg_init();
#endif
/* if not use file system, there is no need init it */
hi_fs_init();
(hi_void)hi_event_init(APP_INIT_EVENT_NUM, HI_NULL);
hi_sal_init();
/* 此处设为TRUE后中断中看门狗复位会显示复位时PC值,但有复位不完全风险,量产版本请务必设为FALSE */
hi_syserr_watchdog_debug(HI_FALSE);
/* 默认记录宕机信息到FLASH,根据应用场景,可不记录,避免频繁异常宕机情况损耗FLASH寿命 */
hi_syserr_record_crash_info(HI_TRUE);
hi_lpc_init();
hi_lpc_register_hw_handler(config_before_sleep, config_after_sleep);
#if defined(CONFIG_AT_COMMAND) || defined(CONFIG_FACTORY_TEST_MODE)
ret = hi_at_init();
if (ret == HI_ERR_SUCCESS) {
hi_at_sys_cmd_register();
}
#endif
/* 如果不需要使用Histudio查看WIFI驱动运行日志等,无需初始化diag */
/* if not use histudio for diagnostic, diag initialization is unnecessary */
/* Shell and Diag use the same uart port, only one of them can be selected */
#ifndef CONFIG_FACTORY_TEST_MODE
#ifndef ENABLE_SHELL_DEBUG
#ifdef CONFIG_DIAG_SUPPORT
(hi_void)hi_diag_init();
#endif
#else
(hi_void)hi_shell_init();
#endif
tcpip_init(NULL, NULL);
#endif
ret = hi_wifi_init(APP_INIT_VAP_NUM, APP_INIT_USR_NUM);
if (ret != HISI_OK) {
printf("wifi init failed!\n");
} else {
printf("wifi init success!\n");
}
app_demo_task_release_mem(); /* 释放系统栈内存所使用任务 */
#ifndef CONFIG_FACTORY_TEST_MODE
app_demo_upg_init();
#ifdef CONFIG_HILINK
ret = hilink_main();
if (ret != HISI_OK) {
printf("hilink init failed!\n");
} else {
printf("hilink init success!\n");
}
#endif
#endif
OHOS_Main();
}该函数首先打印SDK的版本信息,然后挂载文件系统,初始化WiFi信息等等一系列初始化,接这就到OHOS_Main(),该函数就是OpenHarmony系统的初始化。OHOS_Main()函数在文件device/hisilicon/hispark_pegasus/sdk_liteos/app/wifiiot_app/src/ohos_main.c中。
void OHOS_Main()
{
#if defined(CONFIG_AT_COMMAND) || defined(CONFIG_FACTORY_TEST_MODE)
hi_u32 ret;
ret = hi_at_init();
if (ret == HI_ERR_SUCCESS) {
hi_u32 ret2 = hi_at_register_cmd(G_OHOS_AT_FUNC_TBL, OHOS_AT_FUNC_NUM);
if (ret2 != HI_ERR_SUCCESS) {
printf("Register ohos failed!\n");
}
}
#endif
OHOS_SystemInit();
}值得注意的是OHOS_SystemInit()函数是一个弱函数,其定义如下:
void __attribute__((weak)) OHOS_SystemInit(void)
{
return;
}因此该函数主要是系统为应用开发者提供的。OHOS_SystemInit()函数在base/startup/bootstrap_lite/services/source/system_init.c文件中。
void OHOS_SystemInit(void)
{
MODULE_INIT(bsp);
MODULE_INIT(device);
MODULE_INIT(core);
SYS_INIT(service);
SYS_INIT(feature);
MODULE_INIT(run);
SAMGR_Bootstrap();
}到这里基本就完成了所得初始化,其中我们编写的应用就是MODULE_INIT(run)中完成的。
在base/startup/bootstrap_lite/services/source/core_main.h文件中,有如下定义:
MODULE_INIT定义如下:
#define MODULE_INIT(name) \
do { \
MODULE_CALL(name, 0); \
} while (0)MODULE_CALL定义如下:
#define MODULE_CALL(name, step) \
do { \
InitCall *initcall = (InitCall *)(MODULE_BEGIN(name, step)); \
InitCall *initend = (InitCall *)(MODULE_END(name, step)); \
for (; initcall < initend; initcall++) { \
(*initcall)(); \
} \
} while (0)模块的名字定义如下:
#define MODULE_NAME(name, step) ".zinitcall." #name #step ".init"而SYS_RUN在utils/native/lite/include/ohos_init.h中定义。
/**
* @brief Identifies the entry for initializing and starting a system running phase by the
* priority 2.
*
* This macro is used to identify the entry called at the priority 2 in the system startup
* phase of the startup process. \n
*
* @param func Indicates the entry function for initializing and starting a system running phase.
* The type is void (*)(void).
*/
#define SYS_RUN(func) LAYER_INITCALL_DEF(func, run, "run")而LAYER_INITCALL_DEF定义如下:
#define LAYER_INITCALL(func, layer, clayer, priority) \
static __attribute__((constructor(CTOR_VALUE_##layer + LAYER_INIT_LEVEL_##priority))) \
void BOOT_##layer##priority##func() {func();}
#else
#define LAYER_INITCALL(func, layer, clayer, priority) \
static const InitCall USED_ATTR __zinitcall_##layer##_##func \
__attribute__((section(".zinitcall." clayer #priority ".init"))) = func
#endif
// Default priority is 2, priority range is [0, 4]
#define LAYER_INITCALL_DEF(func, layer, clayer) \
LAYER_INITCALL(func, layer, clayer, 2)可以看到最终SYS_RUN宏定义都是定义在.zinitcall中,因此SYS_RUN()宏设置的函数都会在MODULE_INIT(run)完成调用。
好了,最后看看应用启动的调用流程:
欢迎访问我的网站
BruceOu的哔哩哔哩
BruceOu的主页
BruceOu的博客
BruceOu的CSDN博客
BruceOu的简书
BruceOu的知乎
欢迎订阅我的微信公众号
关注公众号[嵌入式实验楼]]获取更多资讯